Videos
Neural Control of Robotic Prosthetic Ankles Improve ‘Natural’ Movement, Stability: Our New Publication on Science Robotics
This work is now published in Science Robotics https://www.science.org/doi/10.1126/s… Neural control of robotic prosthetic ankles enable amputees to activate the prosthetic ankle joints to improve the balance under anticipated postural perturbations. In the video, you can observe that the amputee participant dorsiflex the prosthetic ankle even before the perturbation was applied (anticipatory postural control). The technology enables the participant to use “the ankle strategy” to stabilize their balance while the regular passive prosthesis requires the amputee to use “the step strategy” to stabilize the posture.
Our perspective article on AI applications to robotic prostheses is published on Science Magazine
The article “Artificial intelligence meets medical robotics“ brings experts in medical robotics, including surgical robots and rehabilitation robots, together to discuss how AI transforms the function and capability of these robots to better serve humans and health care systems.
Abduction/Adduction Assistance from Powered Hip Exoskeleton Enables Modulation of User Step Width During Walking
In this study, we showed that hip exoskeleton, acting on mediolateral (ML) direction, can modulate step width in normal walking. Tuning of stiffness in admittance control of a hip exoskeleton can be a viable way for controlling step width. Since step width is important for ML balance, our hip exo may be used to assist foot placement or train ML balance for individuals who have balance deficits. This paper is current available at Techrix.
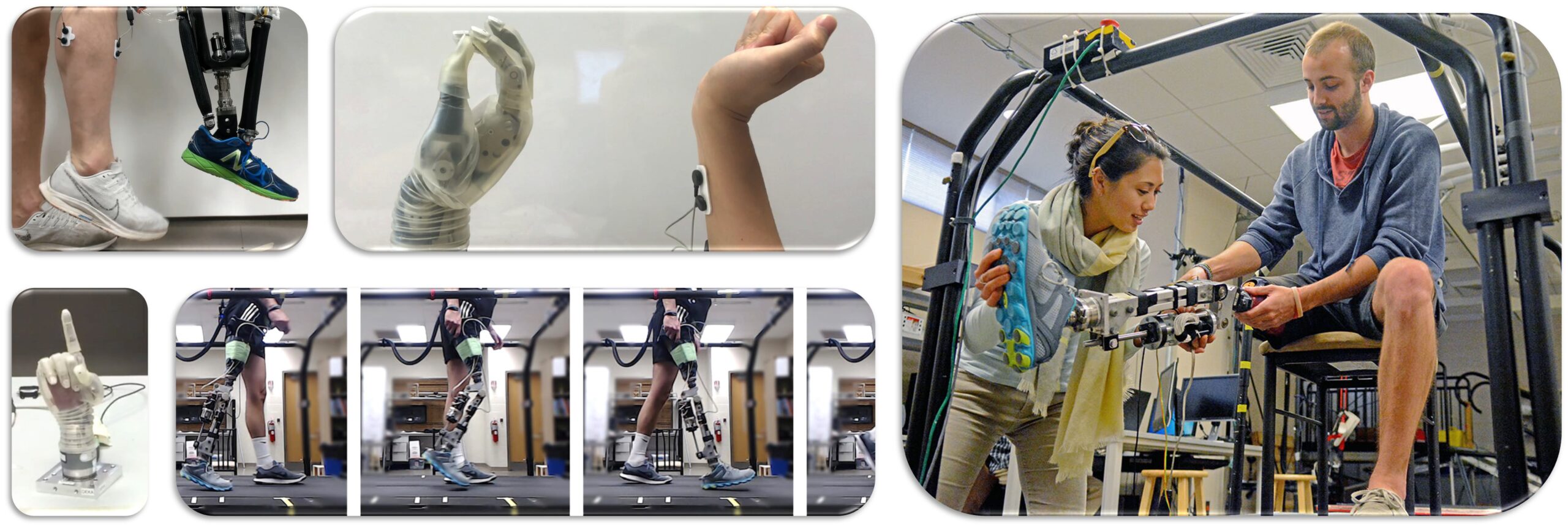
A Novel EMG-based Neural Interface that Enables Coordinated and Fluent Hand and wrist motions
We combined machine learning approaches (such as neural networks and reinforcement learning) and physiological model (forward musculoskeletal model) to design a novel neural-machine interface for EMG decoding and prosthesis wrist and hand control. This controller is robust and intuitive to use. More important, it enables fluent, coordinated hand-wrist motion. The interface also estimate joint torque that may be useful for force control in the future. This paper has been published at IEEE Transactions on Biomedical Engineering here.
NIH NIBIB Features Our Research on Neural Control of Robotic Ankle Prosthesis!
You may read the full story here.
EMG-driven Musculoskeletal model for Neural Control of Robotic Ankle Prosthesis Control (Preliminary Test on an Able-Bodied Subject)
This paper is accepted by IEEE IROS 2022. EMG-driven musculoskeletal model is designed to make EMG signals into ankle control torque. This controller is intuitive and can produce the human intended ankle dynamics.
Reinforcement Learning-based Robotic Hip Exoskeleton Control for Personalized Assistance
This paper is accepted by IEEE ICRA 2021. This paper (Tu et al. 2021) aims at developing a novel data-driven solution framework based on reinforcement learning (RL), without first modeling the human-robot dynamics, to provide optimal and adaptive personalized torque assistance for reducing human efforts during walking. Our automatic personalization solution framework includes the assistive torque profile with two control timing parameters (peak and offset timings), the least square policy iteration (LSPI) for learning the parameter tuning policy, and a cost function based on transferred work ratio. The proposed controller was successfully validated on a healthy human subject to assist unilateral hip extension in walking. The results showed that the optimal and adaptive RL controller as a new approach was feasible for tuning assistive torque profile of the hip exoskeleton that coordinated with human actions and reduced activation level of hip extensor muscle in human.
Rate the Gait Pattern Synthesized by Biological Motion and Principle Component Analysis (PCA)
Can you tell these dots of motion (biological motion) represent human walking? Can you rate the gait pattern (1-6) in the video? Wherein, 6 represents the most normal gait pattern. The answer is at the end of the video. Please check out our recent paper related to this topic (Lee et al. 2020).
The concept of biological motion and our developed PCA algorithm to mesh various walking patterns can be used to examine the gait features attended by the prosthetists or physical therapists in clinics. This method can be also used to study lower limb prosthesis embodiment.
Integrating Computer Vision into Wearable Robotic Prostheses
Video 1
Video 2
Integrating computer vision into wearable robots can be challenged by the limited generalizability of artificial intelligence to handle daily task contexts and environments. Collaborating with ARoS Lab, we adopted Bayesian Deep Learning that can quantify various uncertainty in captured videos and evaluate its decision confidence. This approach has been applied to prediction of the walking environment for future lower limb wearable robots (video 1, paper) and prediction of grasping targets for upper limb prosthesis (Video 2, paper). Such a computer vision method that is aware of its own decision-making competency is promising for safe human-robot interaction.
Future of Movement Science: Interview with Dr. Helen Huang (by Delsys Inc.)
Dr. Huang discussed her ongoing research projects at UNC/NCSU BME, CLEAR, and the promise of using Motor Units to operate powered prostheses with the researchers and engineers at Delsys Inc. More information can be found at https://mailchi.mp/delsys/interview-helen-huang
Tuning Prosthesis Control via Offline Policy Iteration
This video demonstrates a reinforcement learning based optimal controller that can automatically provide personalized control of robotic knee prosthesis in order to reproduce target knee kinematics for individual prosthesis wearers.
EMG-driven musculoskeletal model-based prosthesis hand control
This video demonstrates the real-time EMG-driven musculoskeletal model-based control of the DEKA hand by an able-bodied participant. The prosthesis closely follows the participant’s finger and wrist movements.
The North Carolina Museum of Natural Sciences invited Drs. Helen Huang, Stephanie Huang, and Andy Brandt to present some of our projects at the Science Cafe
Andrea Brandt, our former Ph.D. student was featured in NC State News
Andrea Brandt was recently featured in NC State News as well as on the front page of NSF for her work that highlights the need for adaptive powered knee prostheses to assist amputees.
NSF Science Now Episode 37 featured our research!
Full episode can be found NSF Science 360
NSF Science Now Episode 29 featured our research!
Full episode can be found at NSF Science 360